






The University of Utah’s College of Engineering is nestled against the picturesque Wasatch Mountains in Salt Lake City, providing the perfect backdrop for work and play.
From world-class research and faculty to its home in a bustling city with booming economic growth, there are plenty of reasons the College of Engineering is one of the finest destinations to pursue a top-notch education.
Research
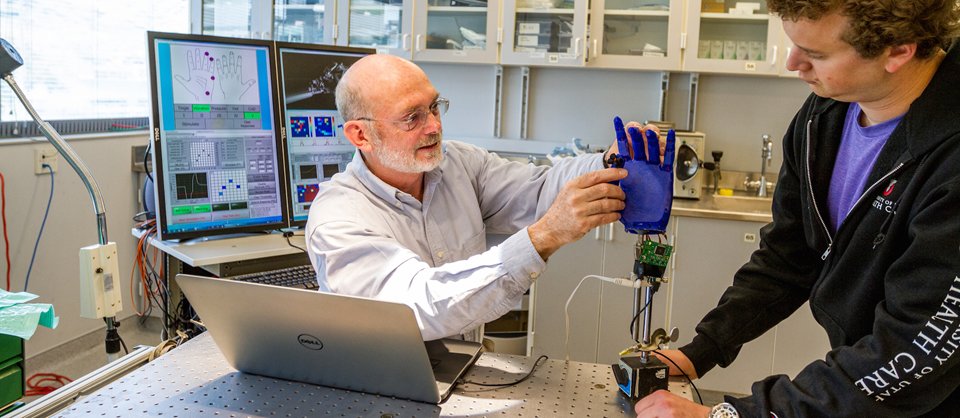
A rich interdisciplinary department comprising science, engineering and medicine. We develop technologies in synthetic biology, medical imaging, biomaterials, biomechanics, drug delivery, neural engineering, computational biomedical engineering, tissue engineering and other specialty areas.
Undergraduate
The University of Utah Biomedical Engineering Department Undergraduate Program has 25 primary faculty, 200 auxiliary faculty, and graduates about 70 Bachelor of Science students annually. The program is among few undergraduate programs in the nation that require a senior project and a biomedical device design experience with significant exposure to the regulatory environment.
Graduate
The University of Utah Biomedical Engineering Graduate Program draws participating faculty from over 30 departments and organizations across 4 colleges, representing both the health sciences and the main campus. Full-time graduate student enrollment exceeds 120 with about a 3:1 ratio of Ph.D. to M.S. students.
Recent News from the Department of Biomedical Engineering
Our students and faculty are constantly doing amazing things. Read about the latest in student successes, faculty research, and more. Click here to view the entire news archive or scroll through the latest news stories below!


Convocation for the John and Marcia Price College of Engineering
Please mark your calendar for our 2024 convocation that will be held on Thursday, May 2nd at 10:30 AM to 12:30 PM in the Jon M. Huntsman Center.
More information on convocation exercises can be found here.
The University Commencement ceremony will be held on Thursday, May 2nd at 6:00 PM at the Jon M. Huntsman Center.
This is an in-person gathering honors graduating students from all colleges and schools from across the University of Utah campus.
More information on commencement exercises can be found here.